

イチゴの“完全自動栽培”をロボットで実現する。そんな目標を掲げるのが、スタートアップのHarvestX株式会社。東京大学の100%子会社である東大IPCの出資を受け、2020年に立ち上がったベンチャー企業です。
彼らはロボット開発を次なるステップへ進めるために、ゲームエンジンの積極的な活用を検討し、Unityエンジニアの採用も進めていると言います。
イチゴ栽培分野でロボティクスとゲームエンジンを組み合わせることで、一体何が可能になるのか。そしてこの挑戦は、Unityエンジニアにとっても新たな進路の一つになるかもしれない!と感じ、CTOの渡邉碧為さんにお話を伺ってきました。

HarvestX株式会社
CTO 渡邉碧為
ロボットによる授粉・収穫技術を確立し、植物工場における果菜類の完全自動栽培の実現を目指してHarvestX株式会社を共同創業。徳山工業高等専門学校で機械電気を学び、卒業時に日本機械学会畠山賞を受賞。東京大学工学部マテリアル工学科卒業。
ミツバチの代わりになって働く、自動授粉ロボット
──HarvestXはどういった事業を手掛けていますか?
渡邉:私たちは、果菜類の完全自動栽培の実現を目指す、東大発のスタートアップです。その第一歩として現在は、イチゴの授粉と収穫を担うロボットの研究開発に注力しています。
CEOの市川友貴は、学生の頃から農業用機器の受託開発などを手がけてきた、根っからのものづくり人間。そんな彼の「イチゴの授粉・収穫の自動化」というアイデアを形にするために、東大IPCの支援のもと、2020年に法人化を果たしました。コアメンバーは市川を含めた3名で、私自身はCTOとして、主にソフトウェアの開発を担当しています。
──CEOの市川さんは、なぜ「イチゴの授粉・収穫の自動化」に着目したのでしょう?
渡邉:実はイチゴに限らず、農作物の「栽培」そのものは自動化が実現されつつあります。天候や害虫などの外的要因に左右されない室内環境で植物を水耕栽培する、いわゆる「植物工場」の実用化が進んだおかげです。実際にレタスやバジルといった葉物野菜は、植物工場での生産量が年々増加しています。
ところが、イチゴのような果菜類を育てる植物工場は、まだほとんど存在しません。果実を実らせるために必要不可欠な「授粉」のプロセスが、大きなネックになっているからです。


──授粉は、雄しべの花粉を、雌しべに付けることですね。
渡邉:そうですね。従来のハウス栽培では、イチゴを受粉させるためにミツバチを活用していました。ハウス内にミツバチを放し飼いにしておけば、花の蜜を求めて飛び回る彼らが、自然に花粉を運んでくれていたんです。
ところが、植物工場のような閉鎖環境では、ストレスのためかミツバチはうまく飛べなくなったり、すぐに死んでしまったりして、受粉率が大幅に低下してしまいます。死骸が腐敗すれば、衛生面でのリスクも高まる。
もっと怖いのは、ミツバチが工場内にカビや菌などを持ち込んでしまうことです。植物工場のメリットのひとつは無菌状態をつくり出せることなのに、それでは元も子もありません。ほかにも「野生のミチバチの個体数が減少しているなかで、ミチバチに頼り続けること自体がサステナブルではない」という批判もあります。
綿棒などを使って、手作業で授粉させていく方法もあるのですが、人件費を考えると現実的ではありません。ドローンによって花粉を噴霧する手法も検討されていますが、導入コストが非常に高い。そこで私たちが進めているのが、ロボットによる授粉の自動化です。


「花の向き」を三次元的に検出する、独自の画像認識技術
──どのように授粉を自動化するのでしょう?
渡邉:画像処理アルゴリズムでイチゴの花を検出し、ロボットアームに装着したブラシで雄しべと雌しべを軽く撫でるようにして「自家受粉」を促しています。手作業をそのままロボットで置き換えるイメージです。ちなみにこのロボットは、花だけではなく果実も識別できるので、アタッチメントを交換すれば収穫にも使えます。
──開発にあたって、苦労した点はありましたか?
渡邉:画像認識の精度を上げることです。「花がどこにあるか」を二次元的に検出できても、「花がどちらを向いているか」を三次元的に検出しようとすると、難易度が途端に跳ね上がるんです。
花の向きが正確にわからないと、雌しべに花粉を均等に付けられず、受粉の成功率も下がります。その後の生育も悪くなってしまうのです。

この課題を乗り越えるために活用したのが、3Dレンダリング技術です。高精度なイチゴの3Dモデルを作成し、それを教師データとして機械学習させることで、画像認識の精度を高めていきました。
既にミチバチを上回る水準に至っていますが、この技術で受粉率がさらに上がることをここまでの検証から見込んでいます。現在は、受粉率を上げることに加えて、より短時間で、より多くのイチゴを授粉させられるロボットとなるべく、自社の植物工場で実証実験を続けているところです。
──開発体制についても教えてください。
渡邉:開発は主に私と市川、そして日本各地でアルバイトとしてお手伝いしてくれているチームメンバーのみんなで行っています。
最近では、農学系の博士課程のメンバーが3人目の正社員としてジョインしました。植物のプロが加わったことで、植物工場の管理もスムーズになり、イチゴの生育条件をより深く理解した上で研究開発を進める体制が整いつつあります。
Unityを使えば、ロボットの開発期間を大幅に圧縮できる
──最近では、ロボットの研究開発にUnityの活用を検討していると伺いました。どのような用途を考えているのでしょう?
渡邉:まずは実証試験のためのシミュレーターに活用したいと考えています。ロボットの設計って、本当に一筋縄ではいかなくて。たとえば、アームを少し伸ばしただけでも、思わぬトラブルの引き金になるかもしれない。そういう可能性を一つずつ潰していくためには、実証試験を重ねていくほかありません。
けれど、現状で私たちのロボットは一機しかありませんし、植物工場の規模も小さいので、信頼できる結果を得るまでに膨大な時間がかかっています。
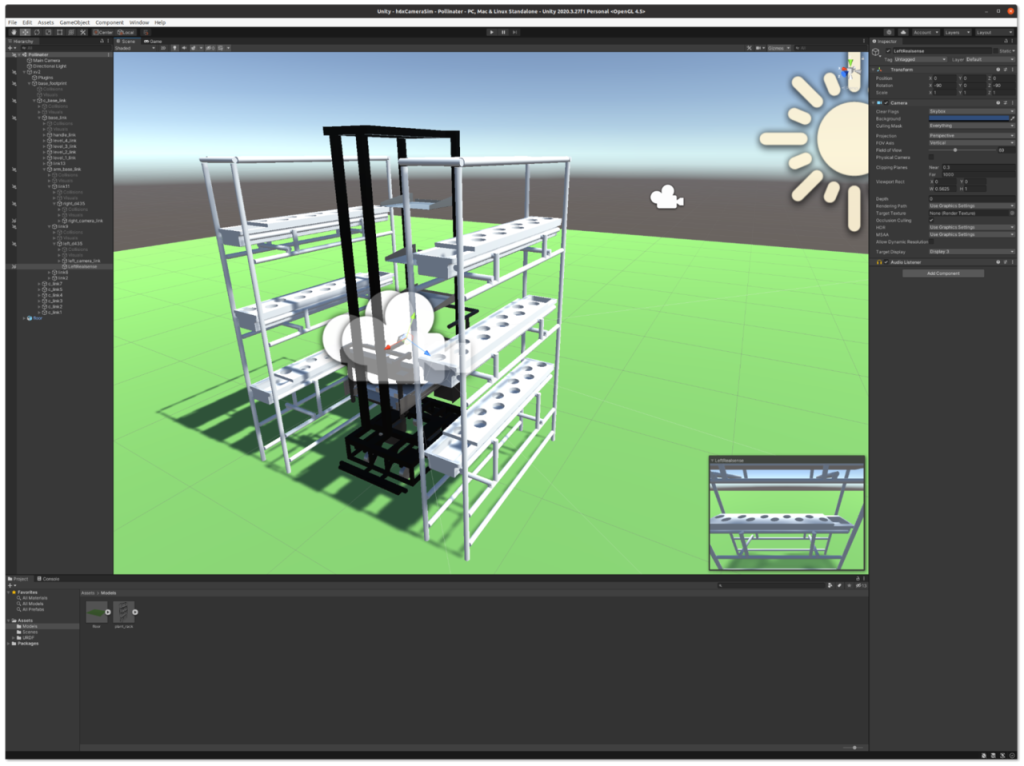
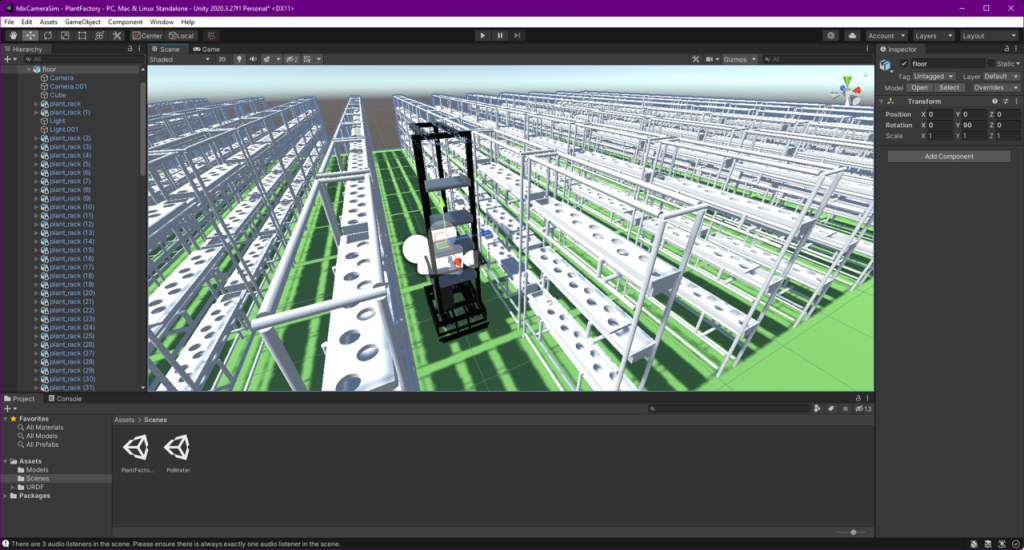
そこで進めているのが、Unity上に植物工場とロボットを再現する試みです。仮想空間内であれば工場の面積に限りはありませんし、複数のロボットを使って、異なる検証を並行して進めることもできます。実現すれば、実証試験にかかる時間を大幅に短縮できるはずです。

──なるほど! ちなみにゲームエンジンのなかで、Unityを選んだ理由があれば教えてください。
渡邉:ロボット用のソフトウェアプラットフォームであるROS(Robot Operating System)との相性の良さですね。Unity上でパラメーターを調整しなくても、ROSで設計した通りのロボットを、仮想空間内へ簡単に出現させることができます。
仮想空間自体の構築しやすさも気に入っています。まだ軽く触った程度ですが、2日ほどで工場を一通り再現することができました。インストールにあたって、ユーザー側の環境構築のハードルが低いことも魅力だと思います。メンバーの所有しているPCのスペックやOSの種類をさほど気にすることなく、気軽に仮想空間をシェアできますからね。
いずれは植物工場を丸ごとデジタルツイン化したい
──そのほかにも御社のロボット開発において、Unityが役立ちそうな部分はありますか?
渡邉:機械学習に必要な教師データを大量に生成できるUnity コンピュータービジョンはすぐにでも活用したいですね。画像認識精度のさらなる向上に役立つはずです。現実の世界では見つけることが難しい「病気にかかったイチゴ」の教師データなどを大量に生成すれば、工場内で発生した病害をいち早く検出する機能も実装できるかもしれません。
実際の植物工場のビジュアライズにもUnityが生かせると感じています。ロボットが撮影したイチゴの様子を、仮想空間上に再現していけば、工場を見回ることなくタブレットなどの端末上で生育状況を立体的に把握できるようになるでしょう。
究極的には、イチゴやロボットを含めて、植物工場の完全なデジタルツインをつくってみたいですね。こうした取り組みを大胆に進めるためにも、ゲームエンジンでの開発経験があるエンジニアを積極的に採用していきたいと考えています。

ゲームエンジン×ロボティクスには、無限の可能性がある
──より具体的には、どんなエンジニアを求めていますか?
渡邉:ゲームエンジンを使って、一つのものをつくり上げた経験のある人であれば大歓迎です。その上で、ロボティクスの知見もある方であれば、すぐにでも即戦力として活躍できるはずです。
今後、ロボット開発にとってゲームエンジンがますます欠かせないツールになることは間違いない。ゲームエンジンに触れた経験があり、「ロボット」や「農業」というテーマに少しでも興味のある方がいたら、気軽にお問い合わせいただけると嬉しいですね。
──ゲームエンジンとロボティクスの両方に関心があるエンジニアにとっては、またとない経験が積めそうですね。
渡邉:ロボットの実機があり、自前の植物工場も所有している会社はそれほどないでしょうから、刺激的な環境だと思います。
個人的には「植物工場におけるロボットの自動化」という課題は、これからロボット分野で活躍していきたい人にとって、最適なファーストステップになるとも感じていて。
物流工場などでロボットを自動化するよりも難しいけれど、閉鎖環境であるために野外での自動化ほどは困難ではない。ここでしっかりと経験を積めば、ロボットによる自動化を必要とする、あらゆる業界で求められる経験となるのではと思います。
それともう一つ、工場で採れるイチゴが毎日食べ放題なことも、弊社で働くメリットかもしれません(笑)。

──魅力的な福利厚生です! 最後に、今後の展望を教えてください。
渡邉:いずれは授粉や収穫だけではなく、古くなった葉っぱを間引く「葉かき」などの作業も含めて、イチゴ栽培のすべてのプロセスを自動化したいですね。
水と電気と栄養だけ供給していれば、人が手を加えることなく、自動でイチゴが育っていく。そんな本当の意味での「植物工場」を実現することで、農業人材不足の解消と食糧の安定生産に貢献したいと考えています。
私たちの子供の世代も、その次の世代も、おいしい果物や野菜を食べられる。サステナブルな食の未来のために、ロボティクスとゲームエンジンの活用を、さらに進めていきます。

(文・福地敦/写真・木村文平)