
遠く離れた工事現場の建設機械(建機)を遠隔操作もしくは自動運転させ、リモートワークで工事を進める。そんなビジョンを実現するのが、スタートアップのARAV株式会社です。
2022年7月現在、20名弱いる社員の多くがロボティクスの研究に携わった経験があるというARAVは、建設業界に根深く残る人材不足の問題を、培った技術を用いて解決することを目指しています。
彼らは建設重機の遠隔操作と自動運転のシミュレーションをするために、Unityを積極的に活用。Unityを扱いながらロボティクスの研究開発を推進できるエンジニアの採用を進めていると言います。
現実世界の課題解決をシミュレーションによって推進する事例から、Unityでの開発に取り組むエンジニアは、何か着想が得られるはず。ARAVの応用技術開発室統括マネージャーである田中良道さんにお話を伺いました。

田中良道
ARAV株式会社 応用技術開発室 統括マネージャー
幼少期に見た『Star Wars EpisodeⅠ』に登場する雑用ロボット「ピットドロイド」に憧れ,漠然とロボット好きになる。学部生時代にOSが何なのかわからない状態から移動ロボットの開発を見様見真似ではじめる。大学院修了時に、自身のロボティクスに関する技術を高めると同時に、世の役に立てたいという思いから博士後期課程進学とロボティクスビジネスの方向を模索。つくばチャレンジ(ロボット競技会)にてARAV創立前の白久と知り合い、その後自身の目的ともマッチしていたためARAVの事業に従事。研究内容は「産業用ロボットの自律化」「多点接触動作計画」「確率的モデル予測制御」。2018年『実用ロボット開発のためのROSプログラミング』を共著。2021年「World Robot Summit 2020 トンネル災害シミュレータ部門 優勝(世界1位)」経済産業大臣賞を受賞。
なぜ建機を遠隔操作・自動運転するのか? 切迫する建設業界の人手不足
──ARAVはどのような事業を手掛けていますか?
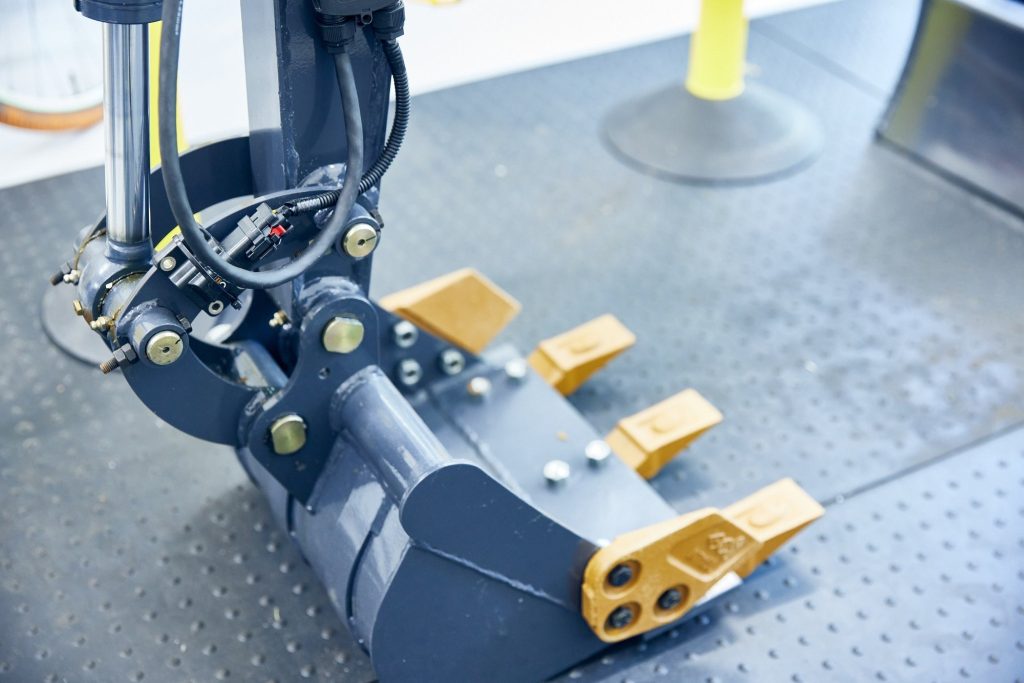
田中:私たちは、ブルドーザーやショベル、ダンプなどの建機を遠隔操作できるシステムを開発しています。わざわざ早朝から工事現場へ赴き、炎天下で振動する重機に乗り込まなくても、自宅から作業ができるようになります。
ARAVのシステムの特徴は、「油圧式」などアナログな仕様で動く建機であっても外付けが可能なことです。たとえ型式が古くとも、適合する建機をお持ちの施工会社さんであれば、システムを装着するだけで遠隔操作や自動運転が行えるようになります。
ARAV創業者の白久レイエス樹は、もともとスケルトニクスという会社を立ち上げ、外骨格スーツを開発した後に、大手自動車メーカーへ就職して運転支援システムの開発に従事。その後に渡米し、シリコンバレーで既存の自動車へ後付けできる自動運転キットを開発する会社を創業しています。
自動運転試験を成功させるに至ったものの、法律の壁が大きいという課題に直面。日本へ帰国した後に、ARAVを設立しました。
──なぜ白久さんは「建機の遠隔操縦・自動運転」に注目したのでしょうか?
田中:米国で過ごしていたある日、日本の建設業界に携わる方から、「本当に人手が足りないから助けてほしい」とTwitterのDMが届いたそうです。気になって調査してみると、日本の建設業界や施工会社が大変な状態になりつつあることが分かりました。
日本では、大型建機が稼働するような工事現場数はゆるやかに減少しています。しかし、それ以上のスピードで、建機を操作できるオペレーターが激減している。少子高齢化などで建設業界に新しく入る人が減っている上に、事故など何かしらの理由で辞めてしまったり、転職したりする人も多いからです。
そのため、本来はオペレーターが3人必要な現場も、人手が足りないために2人体制で回すといったケースが増えています。これ以上、人手が減るようであれば現場作業そのものがストップしかねません。

──建機を遠隔操作もしくは自動運転できれば、現場へ向かう時間などをカットでき、少ない人数でも工事を進めやすくなるということでしょうか。
田中:その通りです。完全自動運転は言わずもがなですが、一部の機能が自動になったり、遠隔操作ができるようになったりするだけでも進めやすくなると考えています。例えば、工事現場は地方の山奥にあることも多く、早朝から移動して作業を始め、夕方には切り上げて戻るという働き方では、1日1現場が限界でした。
遠隔操作・自動運転が実現すれば移動を省力化でき、1日2現場以上をこなせます。また、各建機のオペレーターが現場へ何人も出張しなくても、リモートで複数の建機を切り替えながら操作できます。一部の機能が自動化できるようになれば、一人で複数台の重機を扱うことも可能です。ARAVのシステムを使うと作業効率が何倍にも上がり、施工時のムダをなくせるのです。
──効率が良くなることで、人手不足の問題が解消されるわけですね。
田中:ただ、それだけでは建設現場の課題解決には不十分です。遠隔操作・自動運転が出来るようになっても、そもそも建機を動かすオペレーターが不足している現状は変わりませんから。
ARAVでは、オペレーターの育成も視野に入れています。というのも、ARAVでは大型建機をゲームパッドやスマートフォンから操作できる仕様にしています。建機を運転するハードルを下げることで、新しい人材層を取り込むことができるはずです。
また、遠隔操作・自動運転 のオペレーターは実機のオペレーターとは異なる能力が必要であり、そのような新しい能力を持った人材の育成と発掘を行いたい。もちろん、しっかり訓練を積んでもらいますし、熟練のオペレーターでなくても安全に操作できるシステムを開発しています。
現場の作業効率を向上させながら、オペレーター数も増加させる。この両輪が揃うことで、ようやく建設業界の課題が解決できるのです。
建機の遅れるアップデート。現場崩壊するタイムリミットを防ぎたい

──しかしながら、建機メーカーは遠隔操作や自動運転の重要性にいち早く気づいていてもおかしくないはずです。ARAVのシステムが必要とされているのはなぜでしょうか?
田中:最新式の機体を導入するには数千万円のお金が必要であり、施工会社には買い替えのコストが大きすぎます。また、現場で実際に動いている建機はメーカーや年式がバラバラで、最新機種を揃えたとしても、メーカーまで統一できる現場は少ない。やむを得ず、施工会社はすでに持っている油圧式の建機をあと5〜10年間ほどは使いつづけます。すると当然ながら、遠隔操作や自動運転はなかなか普及しません。
遠隔操作や自動運転は、おそらく数十年後には一般的になるはずです。遠い先の未来では、大手建機メーカーさんが開発した建機もきっと活躍している。しかし、このままでは残念ながら、それらが普及する前に人手不足で現場が回らなくなります。
──現場が崩壊するタイムリミットが、すぐそこにまで迫っていると。
田中:はい。人手不足が深刻化する建設業界では働き方改革が積極的に行われており、具体的には2023年度末までに週休二日制(4週8閉所)の実現を目標としています。だからこそARAVのシステムは、メーカーの異なる油圧式建機でも遠隔操作・自動操縦できるように、外付けの装置をインターフェースからつくったのです。遠隔操縦や自動運転が普及するまでの期間に、建設業界全体が倒れてしまうことを防ぎたい。

特に施工会社は、現状への強い危機感を持っています。メーカー側にはまだ「競合他社より売れる建機をつくるには」「どうすれば業界構造を囲って利益を出せるか」と考える余裕があります。しかし、施工会社は現場が回らなくなったら本当に終わりです。そこで「手持ちの建機を、なるべく低予算で遠隔操作・自動運転できるようにしたい」というニーズが発生するんです。
ARAVの遠隔操作・自動運転システムは、装着後も取り外すことなく通常の建機としてオペレーターが乗り込んで運転することができます。アナログ操作とデジタル操作を切り替えながら、少しづつデジタルの運用を浸透させていってほしいですね。
なお、本当に目指すべき理想像は自動運転の普及であり、遠隔操作はその通過点だと考えています。まずはメーカー、年式問わずに遠隔操作・自動化ができる装置をつくる。そして最終的には、複数のメーカーや、年式の異なる重機が入り交じる施工現場全体を自動化していきたいと思っています。
Unityがシステムインテグレーションに優れている点をARAVは最重視

──ARAVの開発現場ではUnityが活用されていると聞きました。どのように用いられているのでしょうか?
田中:プログラムの開発中に、自動運転のテストでいきなり大型建機を現場で動かすのは危険を伴います。「右旋回の指示を入力したのに、ショベルカーが左に回る」というバグがもしあったら、大事故になりかねません。まずは建機がプログラム通りに動くか実験できる環境が必要で、そこでUnityを使っています。
最近では自動運転のテスト環境だけでなく、建設機械の運転教習に使いたいというお声を多く頂いており、教習用の機能も目下開発しています。
──Unityでシミュレーションするメリットは何でしょうか?
田中:実験が繰り返し簡単にできる環境構築、建機の正確な動作シミュレーション、センシングデータとの組み合わせという、3つの必要条件をUnityはバランス良く満たしています。
アプリケーションの動作が軽いのでラップトップでも十分動かせますし、アセットストアから例えば小屋を選んで設置するなど環境構築も楽です。また、動作シミュレーション用としてだけでなく、建機の未経験者がオペレーションを訓練する環境としても使いやすいと思います。
もっとも、ここまでの用途であれば、他のゲームエンジンやシミュレーターも候補にあがります。Unityを用いているのはリアルな環境とデジタルなプログラムをまとめる「システムインテグレーションのしやすさ」に特色があり、それはロボティクスを専門とする私たちが最も重要視している点です。
確かに、ブルドーザーやショベルの採掘だけを考えるのであれば、「建機で動かした土砂の流れがリアルに見える」シミュレーターで、Unityより精度が良く使い勝手が良いソフトウェアはあります。しかし、建設現場は複数の建機や作業が同時進行で行われている場所です。あらゆる現場や環境を複合的に再現するには、汎用性のあるゲームエンジンが最も使いやすいんです。
たとえば、自動運転車を一台動かすだけならUnityよりも精度が良いシミュレーターはあるでしょう。しかし、街中を数十台の自動運転車が走り、さらに鉄道、自転車、歩き回る人間などを同時に動かして仮想実験しようと考えるならば、システムインテグレーションに優れたシミュレーターが必要になってきます。
──その点はまさにUnityの得意とするところでもあります。ARAVでは、社内実験用に使っているシミュレーター「Open Construction Simulator」を無償公開していますよね。なぜでしょうか?
田中:業界標準のシミュレーターがないと、テクノロジーの進歩が遅くなると考えたからです。各社が個別最適で開発を進めるよりも、最も汎用的かつ全体最適ができるUnityをシミュレーターとして広めることで、建機やロボット間のインテグレーションを活性化できます。
また、ARAVで使っているシミュレーションを他社に試してもらったところ、想像以上に好評だったのも理由のひとつです。深刻化する人手不足を前に、建設業界にはみんなで共有して使える環境が必要だと思います。自社で技術を囲い込むのではなく、オープンソースにして「こんなものが必要だよね」と話し合いながら、業界全体が発展してほしいと願っています。
ARAVが目指す人材像 ~「自動化」の領域で付加価値を発揮する~

──ARAVの将来的な展開を、ぜひ聞かせてください。
田中:今は土木・建設業界を中心とした課題解決に取り組んでいますが、もっと幅広く世の中を見渡せば、まだまだ自動化できていない領域があります。工場、流通、各種インフラなど、私たちの持つ技術が役立つシーンはまだまだ多いはず。
今後は「お客様が困っている課題を、ロボティクス技術と自動化によって解決する」企業になっていくつもりです。
──そのためにもさらなる仲間に加わってほしいですね。求人情報も掲載されていますが、ARAVはどのようなエンジニアを求めていますか?
田中:まずは、「ロボットを実際につくったことがある人」ですね。言い換えると、自分で手を動かし、可能性を試行錯誤し、完成させた成功体験を持っている人です。何かしらの課題が目の前にあった時に、必要な技術を選定し、仮説を立て、自らで仕様を組める力につながると思っています。
また、Unityとロボティクスを両方担えるエンジニアも大歓迎です。実際に、Unityも使える若手メンバーは、技術を掛け合わせてとても活躍しています。さらに広く言えば、「領域を超えて動ける人」が活躍できます。たとえば、Unityが単に扱えるだけでなく、「Unityを扱う部隊を統括するマネージャーの動きができる」と非常に心強いです。
これからもロボティクスと自動化の技術、そしてゲームエンジンを通したシミュレーションやシステムインテグレーションを用いて、人口が減少する日本で起こるさまざまな課題を、ARAVでは解決していきたいです。

(文・石田哲大/写真・木村文平)